
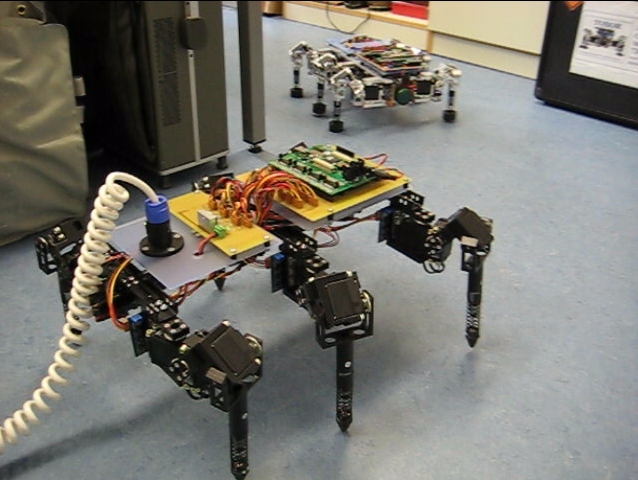
TOBOR NG bei seinen ersten Schritten auf der Institutsterrasse. Die Steuerung erfolgt über einen wireless PS2-Controller.
-
Neueste Beiträge
Kategorien
Meta
TOBOR NG bei seinen ersten Schritten auf der Institutsterrasse. Die Steuerung erfolgt über einen wireless PS2-Controller.
TOBOR NG läßt sich jetzt mit einem Playstation2-Controller (wireless) steuern. Die Bluetooth-Steuerung vom Laptop aus ist Geschichte.

TOBOR NG ist heute seine ersten paar Schritte gelaufen! Dabei wurde er noch vom Teststand aus mit Strom versorgt. TOBOR ist zur Zeit zur Wartung in Tübingen bevor er zur Fortsetzung der Ausstellung nach Stuttgart kommt.
Die Aluminium-Kühlkörper für die Beinplatine von TOBOR NG wurden passend zur Farbe der POM-Teile schwarz eloxiert.

Jörg hat die neue Platine, die zur Stromversorgung und Ansteuerung der Servos eines einzelnen Beines dient, fertiggestellt. Außerdem befinden sich noch Hallsonden und ADCs zur Bestimmung der Leistungsaufnahme der Servos auf der Platine, mit denen sich das Aufsetzens eines Beines auf dem Boden in Echtzeit feststellen lässt. Dies ermöglicht gleichermaßen das sichere Laufen auf unebenem Untergrund sowie das Anhalten vor Abgründen.

Timo Drescher hat inzwischen die Teile für das erste Bein von TOBOR ’next generation‘ aus Polyoxymethylen (POM) angefertigt. Das neue Material zeichnet sich durch hohe Beständigkeit, vor allem aber durch sein geringes Gewicht und gute Verarbeitungseigenschaften aus. Ausserdem sind wir auf Digitalservos vom Typ HSR-5980SG von Hitec umgestiegen. Anfang September kommt TOBOR aus Berlin zurück und ist für ein-, zwei Wochen hier, bevor er zur Fortsetzung der Ausstellung nach Frankfurt kommt.


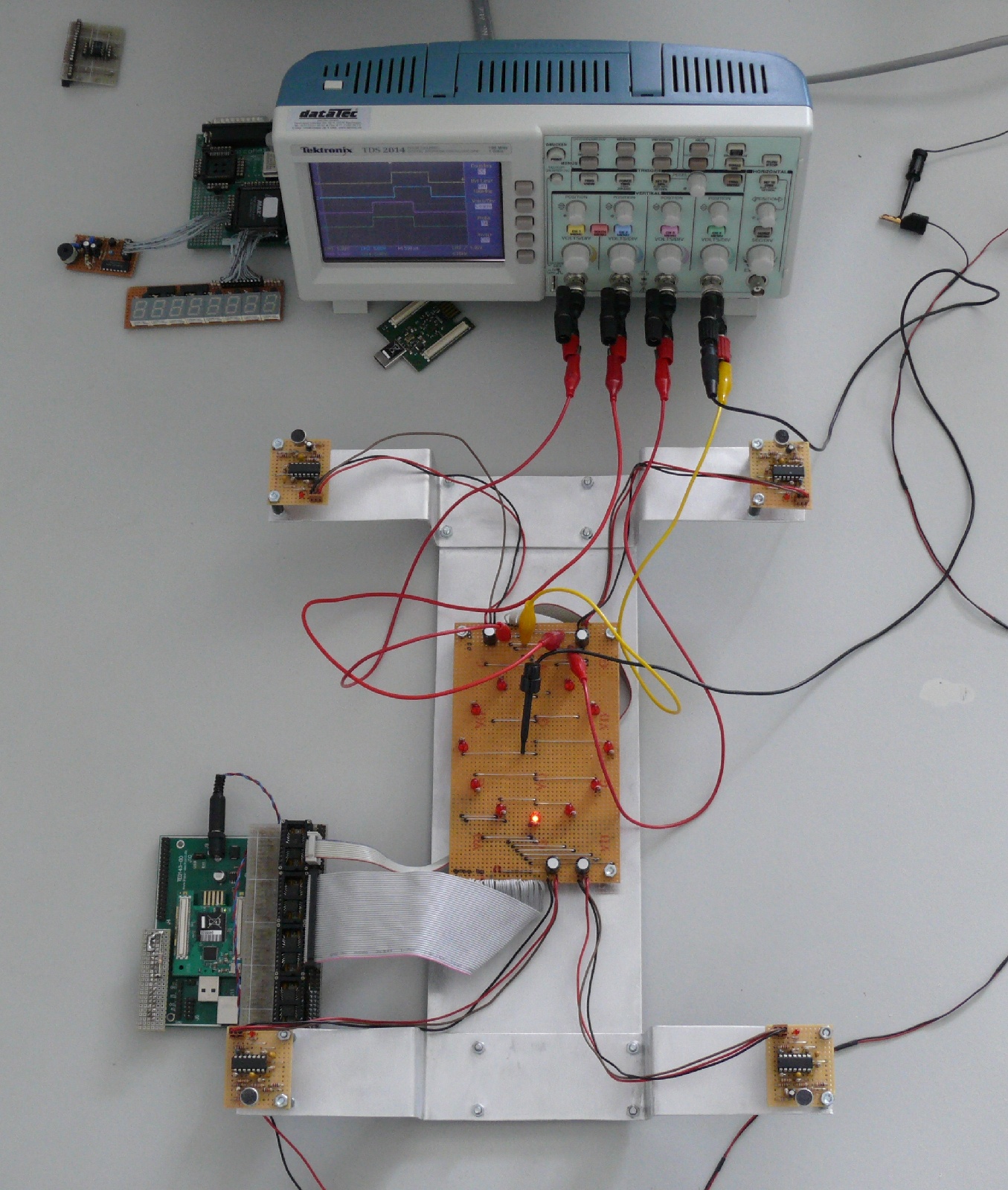 Als ersten Typ von Sensorik für TOBOR NG haben wir ein Schallortungssystem entwickelt. Es besteht aus vier Mikrofonen, die mit Bandpässen für den Frequenzbereich von Sprache ausgestattet sind. Ein FPGA enthält die digitale Logik zum Auswerten der Schall-Laufzeitunterschiede zwischen den Mikrofonen. Hieraus wird die Richtung der Schallquelle errechnet und im Moment mittels einer LED angezeigt.
Als ersten Typ von Sensorik für TOBOR NG haben wir ein Schallortungssystem entwickelt. Es besteht aus vier Mikrofonen, die mit Bandpässen für den Frequenzbereich von Sprache ausgestattet sind. Ein FPGA enthält die digitale Logik zum Auswerten der Schall-Laufzeitunterschiede zwischen den Mikrofonen. Hieraus wird die Richtung der Schallquelle errechnet und im Moment mittels einer LED angezeigt.
Ausgestattet mit diesem System und einer Spracherkennung kann TOBOR durch Zurufen von Kommandos gesteuert werden, bzw. neugierig auf Schallquellen, welche in einem gewählten Frequenzband emittieren, reagieren.