TOBOR Datenblatt
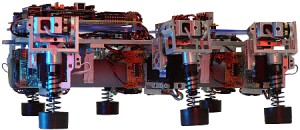
- sechs Beine: zwei Reihen zu je drei Beinen
- Beinmodule: alle Beine sind baugleich und können untereinander getauscht werden
- Beinaufbau aus jeweils sieben gefrästen Aluminiumrahmen, integrierte Kabelführung
- drei Gelenke pro Bein
- Gelenkantrieb mit High Torque Servos (Hightec HS945MG)
- Fußsegmente mit Öldruckstoßdämpfer und drehbarem Gummifuß
- Gummidämpfer für oberen Bewegungsanschlag
- gelochtes Chassis aus Aluminium
- hochfeste Aluminiumschrauben
- zweifach kugelgelagerte Gelenkachsen aus Stahl
- Antriebsscheibenverstärkung aus Aluminium
- Strombegrenzung an jedem Servo (1,5 A)
- Stromflußüberwachung an jedem Servo mit Rail-To-Rail Operationsverstärkern
- 8 Bit Multiplex ADCs
- Ablaufsteuerung für Gehsequenzen in Xilinx Spartan 3 FPGA (VHDL Design)
- Bluetooth Controller zur Fernsteuerung vom Laptop aus
- speziell entwickelte Laptopsoftware zur Fernsteuerung via Bluetooth
- abnehmbare Akkustromversorgung mit integrierter Entladeanzeige
- NiMH Akkus, 6 Zellen; 7,2 V; 9000 mAh
- Abmessungen (LxBxH): 40 cm x 32 cm x 18 cm
- Gesamtgewicht: 4900 g
