
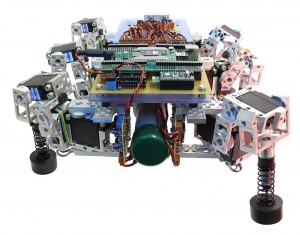
 TOBOR ist unsere erste Entwicklung eines sechsbeinigen autonomen Laufroboters. Frühe Entwürfe für die Beine von Tobor entstanden im Januar 2005. Die erste Etappe der Entwicklung bestand zunächst darin, ein Roboterbein mit drei Gelenken zu entwerfen, das ausreichend Kraft und Geschwindigkeit besaß. Ein solches Bein (Prototyp A) konnten wir bis April 2005 in Handarbeit fertig stellen. Mängel bei der mechanischen Belastbarkeit führten dann im Frühjahr 2006 zu einer Neuentwicklung des Beines (Prototyp B), welches mehr Kraft besaß und eine Vielzahl der Probleme des ersten Entwurfs überwand. Im Laufe des Jahres 2006 entwickelten wir daraus verschiedene Versionen dieses Prototyps. Im August 2006 beschlossen wir eine weitere Änderung der Beingeometrie (Prototyp C) und die Fertigung von sechs gleichen Exemplaren dieses Beines für den TOBOR Prototyp.
TOBOR ist unsere erste Entwicklung eines sechsbeinigen autonomen Laufroboters. Frühe Entwürfe für die Beine von Tobor entstanden im Januar 2005. Die erste Etappe der Entwicklung bestand zunächst darin, ein Roboterbein mit drei Gelenken zu entwerfen, das ausreichend Kraft und Geschwindigkeit besaß. Ein solches Bein (Prototyp A) konnten wir bis April 2005 in Handarbeit fertig stellen. Mängel bei der mechanischen Belastbarkeit führten dann im Frühjahr 2006 zu einer Neuentwicklung des Beines (Prototyp B), welches mehr Kraft besaß und eine Vielzahl der Probleme des ersten Entwurfs überwand. Im Laufe des Jahres 2006 entwickelten wir daraus verschiedene Versionen dieses Prototyps. Im August 2006 beschlossen wir eine weitere Änderung der Beingeometrie (Prototyp C) und die Fertigung von sechs gleichen Exemplaren dieses Beines für den TOBOR Prototyp.
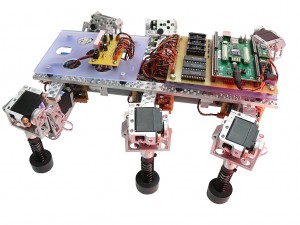 Ein erster Entwurf von TOBOR mit sechs Beinen gelang uns bis Jahresende 2006. In den Monaten danach führten Änderungen an zahlreichen Details zu einem deutlich verbesserten Bewegungsablauf. Die daran anschließende geplante weitere Entwicklung der Sensorik (Phase III) musste jedoch vorübergehend ausgesetzt werden, da TOBOR seit März 2006 in der Wanderausstellung „Die Roboter kommen!“ der Museumsstiftung für Post und Telekommunikation zu sehen ist. Die Ausstellung wurde bereits in Berlin, Frankfurt, Stuttgart, Kerkrade mit großem Erfolg gezeigt und kann ab 1. April in Amsterdam besucht werden.
Ein erster Entwurf von TOBOR mit sechs Beinen gelang uns bis Jahresende 2006. In den Monaten danach führten Änderungen an zahlreichen Details zu einem deutlich verbesserten Bewegungsablauf. Die daran anschließende geplante weitere Entwicklung der Sensorik (Phase III) musste jedoch vorübergehend ausgesetzt werden, da TOBOR seit März 2006 in der Wanderausstellung „Die Roboter kommen!“ der Museumsstiftung für Post und Telekommunikation zu sehen ist. Die Ausstellung wurde bereits in Berlin, Frankfurt, Stuttgart, Kerkrade mit großem Erfolg gezeigt und kann ab 1. April in Amsterdam besucht werden.
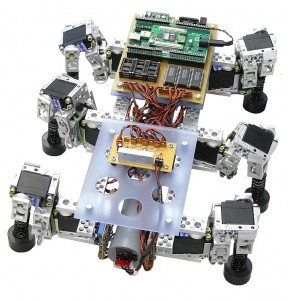 Die TOBOR-Roboter setzen für die Koordination der Beine während der unterschiedlichen Bewegungsabläufe beim Gehen, sowie für die Erzeugung der PWM-Signale der Servo-Motoren auf FPGA-Technologie, nicht auf Microcontroller, wie viele andere Projekte. Das Ziel war und ist die Entwicklung intelligenter Beine, die ohne Computer-Kontrolle auskommen und eine Vielzahl von Bewegungsabläufen autonom beherrschen. TOBOR hat Phase II der Entwicklung abgeschlossen und ist eine vollständig fernsteuerbare Gehmaschine. Die Steuerung erfolgt via Bluetooth mit einer speziell für TOBOR entwickelten Steuersoftware. Alternativ existiert auf TOBOR ein sogenannter Demo-Button, mit dem der Roboter in einen kurzen Demo-Mode geschaltet werden kann, der vor allem die Vorführung im Museum erleichtern soll.
Die TOBOR-Roboter setzen für die Koordination der Beine während der unterschiedlichen Bewegungsabläufe beim Gehen, sowie für die Erzeugung der PWM-Signale der Servo-Motoren auf FPGA-Technologie, nicht auf Microcontroller, wie viele andere Projekte. Das Ziel war und ist die Entwicklung intelligenter Beine, die ohne Computer-Kontrolle auskommen und eine Vielzahl von Bewegungsabläufen autonom beherrschen. TOBOR hat Phase II der Entwicklung abgeschlossen und ist eine vollständig fernsteuerbare Gehmaschine. Die Steuerung erfolgt via Bluetooth mit einer speziell für TOBOR entwickelten Steuersoftware. Alternativ existiert auf TOBOR ein sogenannter Demo-Button, mit dem der Roboter in einen kurzen Demo-Mode geschaltet werden kann, der vor allem die Vorführung im Museum erleichtern soll.