
 TOBOR NG ist unser zweiter Entwurf für einen autonomen sechsbeinigen Laufroboter. Wir entwickeln TOBOR NG seit April 2006. Er ist eine neue, weiter fortgeschrittene Version von TOBOR, die einige Probleme der ersten TOBOR Laufmaschine überwinden konnte. TOBOR NG ist heute auf dem gleichen Entwicklungsstand wie TOBOR angekommen (Phase II) und wird von nun an mit Hinblick auf eine vollständig autonome robotische Steuerung weiter entwickelt. Wir freuen uns, nun auch TOBOR NG auf der Tobor-Webseite präsentieren zu können!
TOBOR NG ist unser zweiter Entwurf für einen autonomen sechsbeinigen Laufroboter. Wir entwickeln TOBOR NG seit April 2006. Er ist eine neue, weiter fortgeschrittene Version von TOBOR, die einige Probleme der ersten TOBOR Laufmaschine überwinden konnte. TOBOR NG ist heute auf dem gleichen Entwicklungsstand wie TOBOR angekommen (Phase II) und wird von nun an mit Hinblick auf eine vollständig autonome robotische Steuerung weiter entwickelt. Wir freuen uns, nun auch TOBOR NG auf der Tobor-Webseite präsentieren zu können!
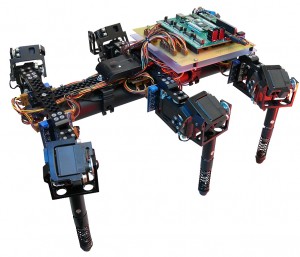 Die TOBOR-Roboter setzen für die Koordination der Beine während der unterschiedlichen Bewegungsabläufe beim Gehen sowie für die Erzeugung der PWM-Signale der Servo-Motoren auf FPGA-Technologie, nicht auf Microcontroller, wie viele andere Projekte. Das Ziel war und ist die Entwicklung intelligenter Beine, die ohne Computer-Kontrolle auskommen und eine Vielzahl von Bewegungsabläufen autonom beherrschen. Ein Onboardcomputer, der TOBOR NG später steuern wird, soll nur die Orientierung und die Wegplanung übernehmen; die Bewegung der Beine wird in einem System niederer Hierarchie weitgehend automatisch ablaufen. Die TOBOR-Roboter verwenden beide den Spartan-3 FPGA der Firma Xilinx. Das FPGA-Design für die Bewegungssteuerung ist in der Hardwarebeschreibungssprache VHDL entwickelt und kommuniziert über ein SPI-Interface mit einem Bluetooth- sowie auch mit einem PlayStation2 Funk-Controller, über den sich TOBOR NG derzeit fernsteuern lässt. Der Entwurf in VHDL erleichtert kurzfristige Anpassungen bei der Steuerung und eine schnelle Entwicklung.
Die TOBOR-Roboter setzen für die Koordination der Beine während der unterschiedlichen Bewegungsabläufe beim Gehen sowie für die Erzeugung der PWM-Signale der Servo-Motoren auf FPGA-Technologie, nicht auf Microcontroller, wie viele andere Projekte. Das Ziel war und ist die Entwicklung intelligenter Beine, die ohne Computer-Kontrolle auskommen und eine Vielzahl von Bewegungsabläufen autonom beherrschen. Ein Onboardcomputer, der TOBOR NG später steuern wird, soll nur die Orientierung und die Wegplanung übernehmen; die Bewegung der Beine wird in einem System niederer Hierarchie weitgehend automatisch ablaufen. Die TOBOR-Roboter verwenden beide den Spartan-3 FPGA der Firma Xilinx. Das FPGA-Design für die Bewegungssteuerung ist in der Hardwarebeschreibungssprache VHDL entwickelt und kommuniziert über ein SPI-Interface mit einem Bluetooth- sowie auch mit einem PlayStation2 Funk-Controller, über den sich TOBOR NG derzeit fernsteuern lässt. Der Entwurf in VHDL erleichtert kurzfristige Anpassungen bei der Steuerung und eine schnelle Entwicklung.
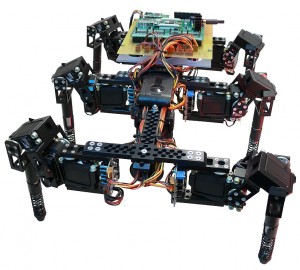 Hall-Detektoren und spezielle Operations-verstärker werten an jedem Bein den Stromfluss der einzelnen Servos aus, die Daten werden durch serielle ADCs dem FPGA mitgeteilt. Mit Hilfe der Strommessung kann das Aufsetzen der Füße am Boden oder das Anstehen an Hindernissen erkannt werden, das Bein wird dann entsprechend gesteuert. Der Roboter erfährt auf diese Weise etwas über die Belastung der Beine und kann auf die Bodenbeschaffenheit reagieren. TOBOR NG erreicht damit nun die Entwicklungsphase III, in der wir ein Sensornetzwerk aufbauen wollen. Dieses besteht neben der Strommessung in den Beinen auch aus Ultraschall-, Infrarot- und Spracherkennungssensoren sowie einer Schallquellendetektion und einem Piezo-Gyroskop für die Richtungskontrolle. Die Sensoren werden TOBOR NG eine umfangreiche Interaktion mit seiner Umwelt ermöglichen.
Hall-Detektoren und spezielle Operations-verstärker werten an jedem Bein den Stromfluss der einzelnen Servos aus, die Daten werden durch serielle ADCs dem FPGA mitgeteilt. Mit Hilfe der Strommessung kann das Aufsetzen der Füße am Boden oder das Anstehen an Hindernissen erkannt werden, das Bein wird dann entsprechend gesteuert. Der Roboter erfährt auf diese Weise etwas über die Belastung der Beine und kann auf die Bodenbeschaffenheit reagieren. TOBOR NG erreicht damit nun die Entwicklungsphase III, in der wir ein Sensornetzwerk aufbauen wollen. Dieses besteht neben der Strommessung in den Beinen auch aus Ultraschall-, Infrarot- und Spracherkennungssensoren sowie einer Schallquellendetektion und einem Piezo-Gyroskop für die Richtungskontrolle. Die Sensoren werden TOBOR NG eine umfangreiche Interaktion mit seiner Umwelt ermöglichen.