
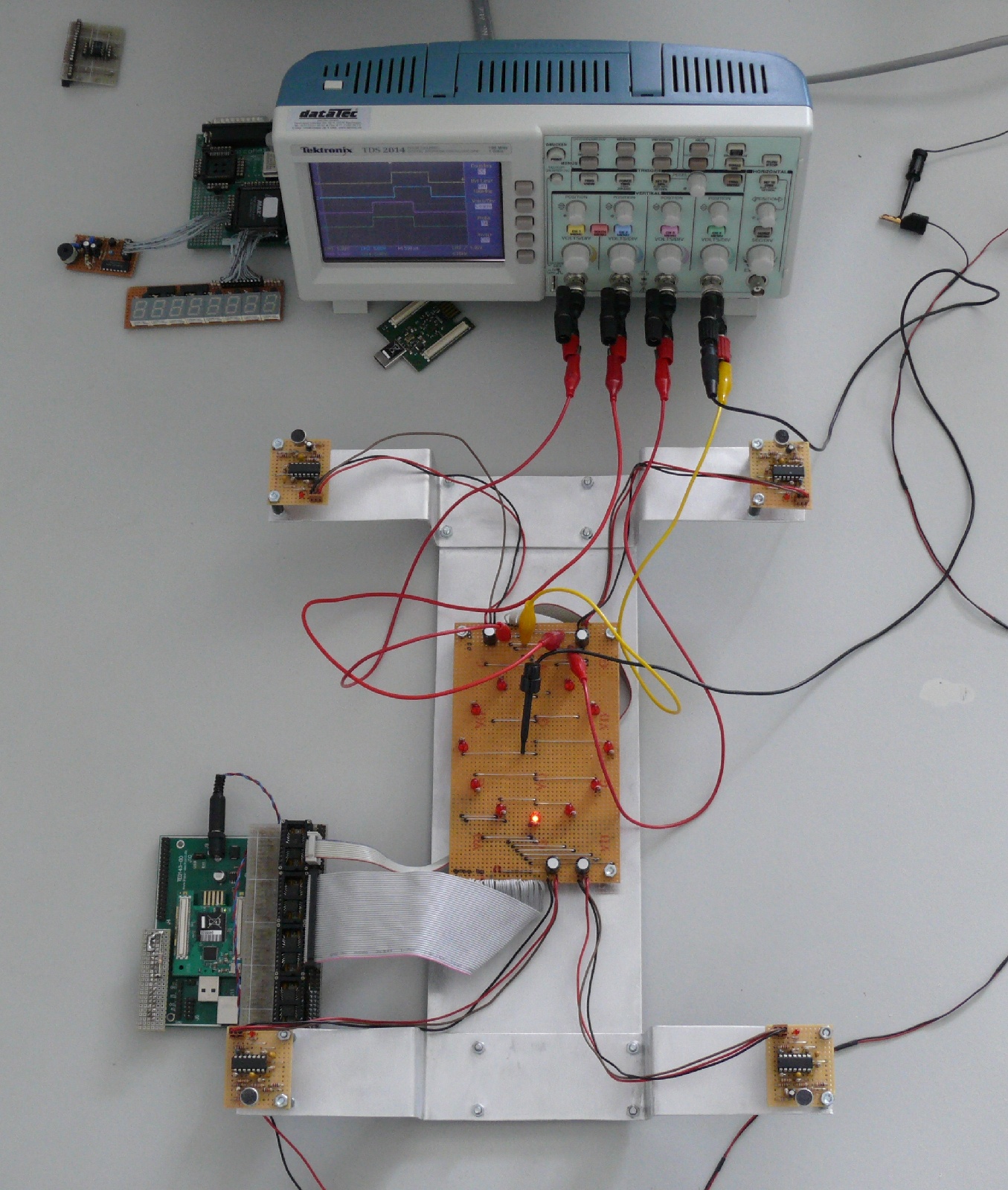
 Als ersten Typ von Sensorik für TOBOR NG haben wir ein Schallortungssystem entwickelt. Es besteht aus vier Mikrofonen, die mit Bandpässen für den Frequenzbereich von Sprache ausgestattet sind. Ein FPGA enthält die digitale Logik zum Auswerten der Schall-Laufzeitunterschiede zwischen den Mikrofonen. Hieraus wird die Richtung der Schallquelle errechnet und im Moment mittels einer LED angezeigt.
Als ersten Typ von Sensorik für TOBOR NG haben wir ein Schallortungssystem entwickelt. Es besteht aus vier Mikrofonen, die mit Bandpässen für den Frequenzbereich von Sprache ausgestattet sind. Ein FPGA enthält die digitale Logik zum Auswerten der Schall-Laufzeitunterschiede zwischen den Mikrofonen. Hieraus wird die Richtung der Schallquelle errechnet und im Moment mittels einer LED angezeigt.
Ausgestattet mit diesem System und einer Spracherkennung kann TOBOR durch Zurufen von Kommandos gesteuert werden, bzw. neugierig auf Schallquellen, welche in einem gewählten Frequenzband emittieren, reagieren.