
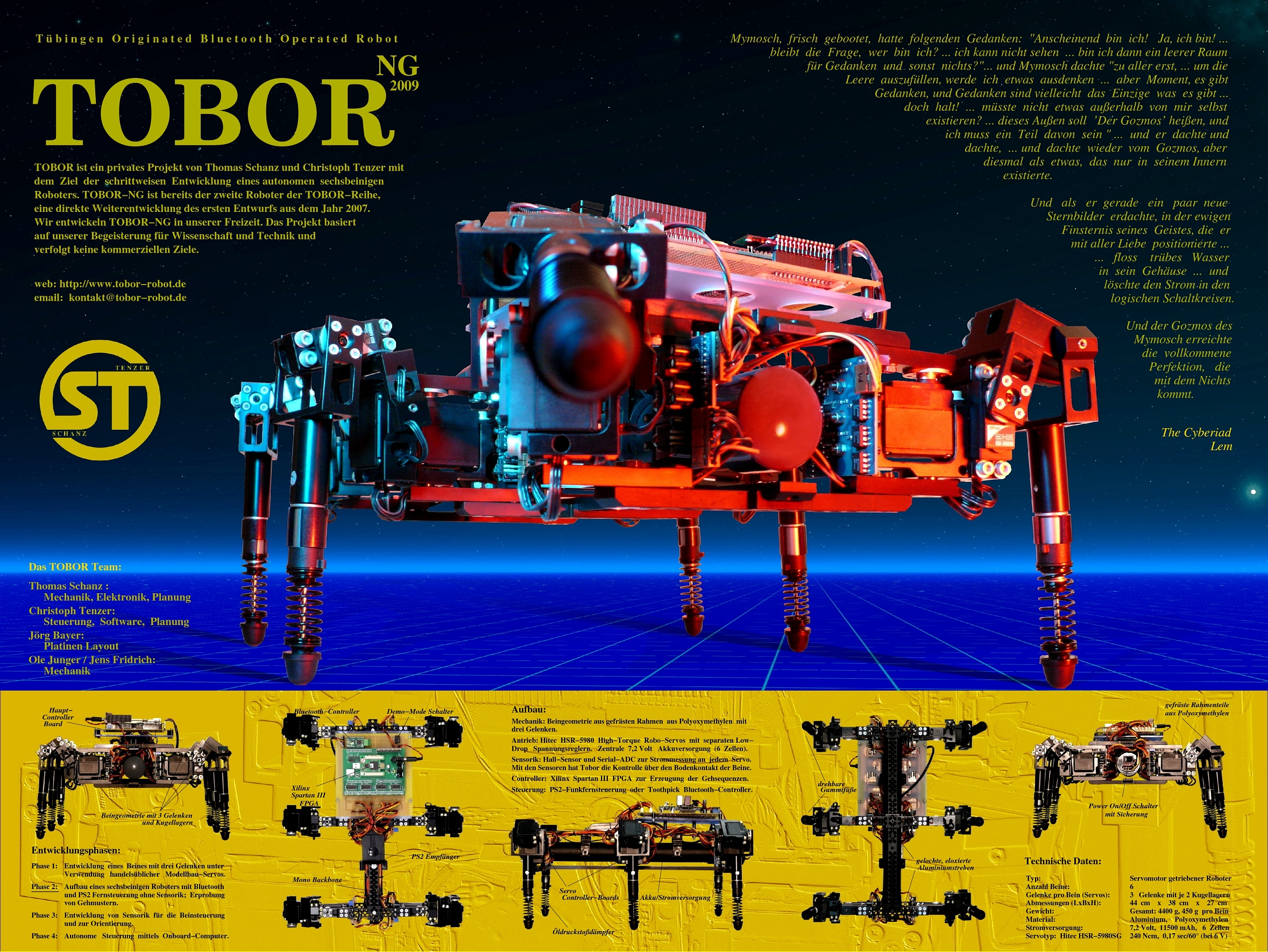
Es gibt jetzt auch ein Poster zu TOBOR NG!
-
Neueste Beiträge
Kategorien
Meta
Es gibt jetzt auch ein Poster zu TOBOR NG!
Etwa 20 Teilnehmer des von M. Sahinol angebotenen techniksoziologischen Seminar des Interdepartmental Centre for Ethics in the Sciences and Humanities (IZEW) der Uni Tübingen besuchten heute TOBOR NG und diskutierten mit uns über die Technisierung der Gesellschaft. Anschließend fand eine Führung durch die Labore im Lehrstuhl von Prof. Zell statt.

TOBOR NG hinterläßt Spuren im Schnee bei einem weiteren Ausflug auf der Institutsterrasse.
TOBOR NG bei seinen ersten Schritten auf der Institutsterrasse. Die Steuerung erfolgt über einen wireless PS2-Controller.
TOBOR NG läßt sich jetzt mit einem Playstation2-Controller (wireless) steuern. Die Bluetooth-Steuerung vom Laptop aus ist Geschichte.

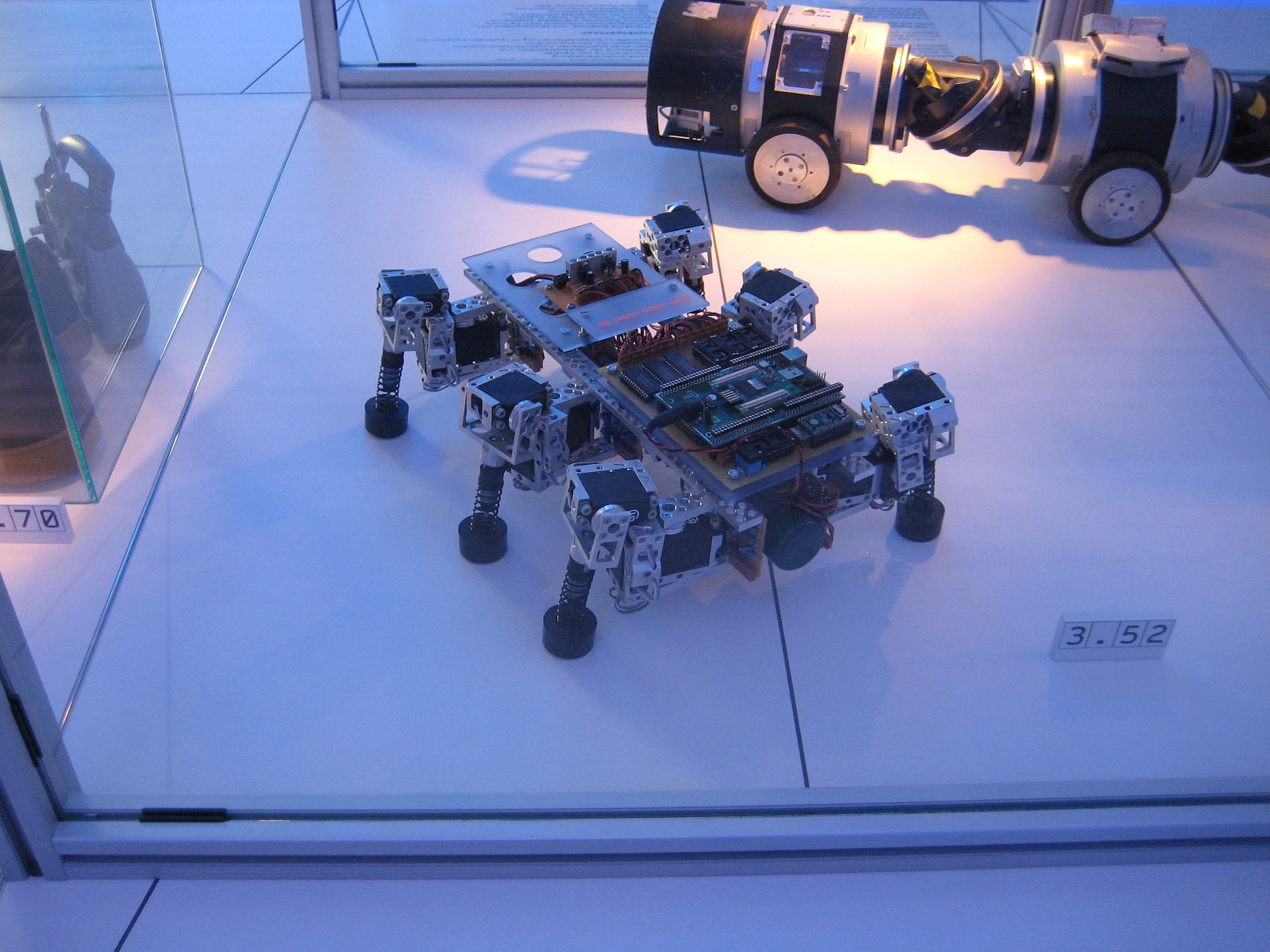
Die Roboterausstellung und TOBOR sind vom 27.05.2008 bis 19.07.2008 in Stuttgart im Haus der Wirtschaft zu sehen.
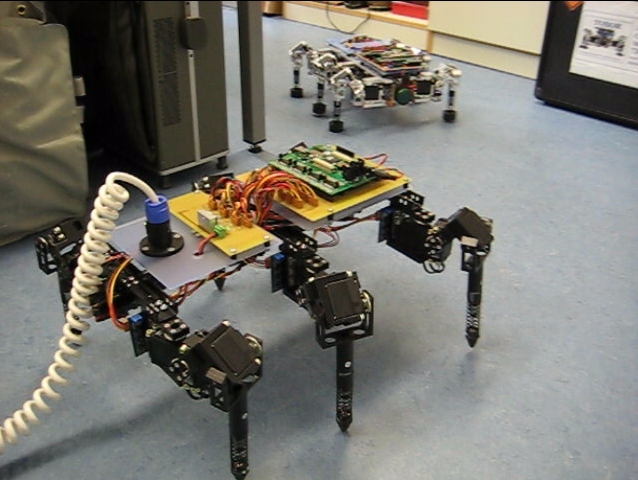
TOBOR NG ist heute seine ersten paar Schritte gelaufen! Dabei wurde er noch vom Teststand aus mit Strom versorgt. TOBOR ist zur Zeit zur Wartung in Tübingen bevor er zur Fortsetzung der Ausstellung nach Stuttgart kommt.
Die Aluminium-Kühlkörper für die Beinplatine von TOBOR NG wurden passend zur Farbe der POM-Teile schwarz eloxiert.

Jörg hat die neue Platine, die zur Stromversorgung und Ansteuerung der Servos eines einzelnen Beines dient, fertiggestellt. Außerdem befinden sich noch Hallsonden und ADCs zur Bestimmung der Leistungsaufnahme der Servos auf der Platine, mit denen sich das Aufsetzens eines Beines auf dem Boden in Echtzeit feststellen lässt. Dies ermöglicht gleichermaßen das sichere Laufen auf unebenem Untergrund sowie das Anhalten vor Abgründen.
