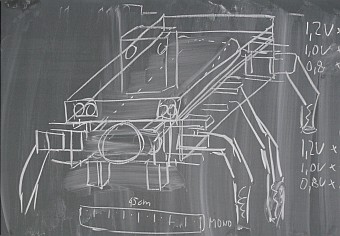
Das erste Bein (handgesägt aus Aluplatten) ist fertig.
Das Projekt, einen sechsbeinigen Laufroboter zu bauen, beginnt!